Comparison of MH370 Flight Paths
Based on Waypoints
Richard Godfrey
1st February 2016
Introduction
Many different flight models have been developed to try and fit the Inmarsat satellite data to plausible flight paths that may have been flown by MH370 under an assumption of autopilot control.
Here are a couple of typical examples:
- An assumed true track (TT) mode usually results in the choice of a late final major turn (FMT), fitting a course of around 186.2°T (i.e. azimuth 186.2 degrees from true north); this results in a RMS BTO error of 9.2 km and a RMS BFO error of 3.7 Hz. (RMS = root mean square; BTO = burst timing offset; BFO = burst frequency offset).
- A magnetic heading (MH) mode usually results in the choice of an early FMT, fitting a course of around 193.8°M (i.e. degrees from magnetic north), which results in a RMS BTO error of 18.3 km and a RMS BFO error of 3.9 Hz.
There are, of course, many other conceivable flight paths depending on assumed values for the location of the FMT, the speed mode, the altitude, step climbs, lateral offsets, winds, magnetic declination, etc.
Background
There are two problems in particular with these typical flight model examples:
- The BFO error obtained at 19:41 UTC is much higher than at other times later in the flight: around 8 Hz compared with a typical BFO error of between 1 Hz and 4 Hz.
- The BFO data for the first attempted phone call shows a fairly steady path for 61 seconds (between 18:39:55 and 18:40:56 UTC) near either 161°T or 200°T (i.e. at azimuths close to equal angles each side of due south).
In order to see if these two problems could be resolved, I have examined alternative flight paths using a single waypoint entered into the Flight Management System (FMS) as opposed to a course selected using the heading bug; Mike Exner has argued that, if waypoint navigation were used after the FMT, then it is more likely that a single waypoint was entered.
Method
First, I entered each possible single waypoint from both an ‘Early’ and a ‘Late’ FMT (at times and locations shown in Table 1 below) into my flight model. I kept the altitude constant at 34,000 feet and speed constant at Mach 0.817 in all cases.
Next, I determined the RMS BTO and BFO errors in each case from 19:41 to 00:11 UTC (Table 1 below); I also noted the BTO and BFO errors at 19:41 UTC (Table 2 below).
Results
The results are given in the tables below. Green is used to highlight the best result, orange for the second best, and yellow for BTO errors below 50 km or BFO errors below 4 Hz.
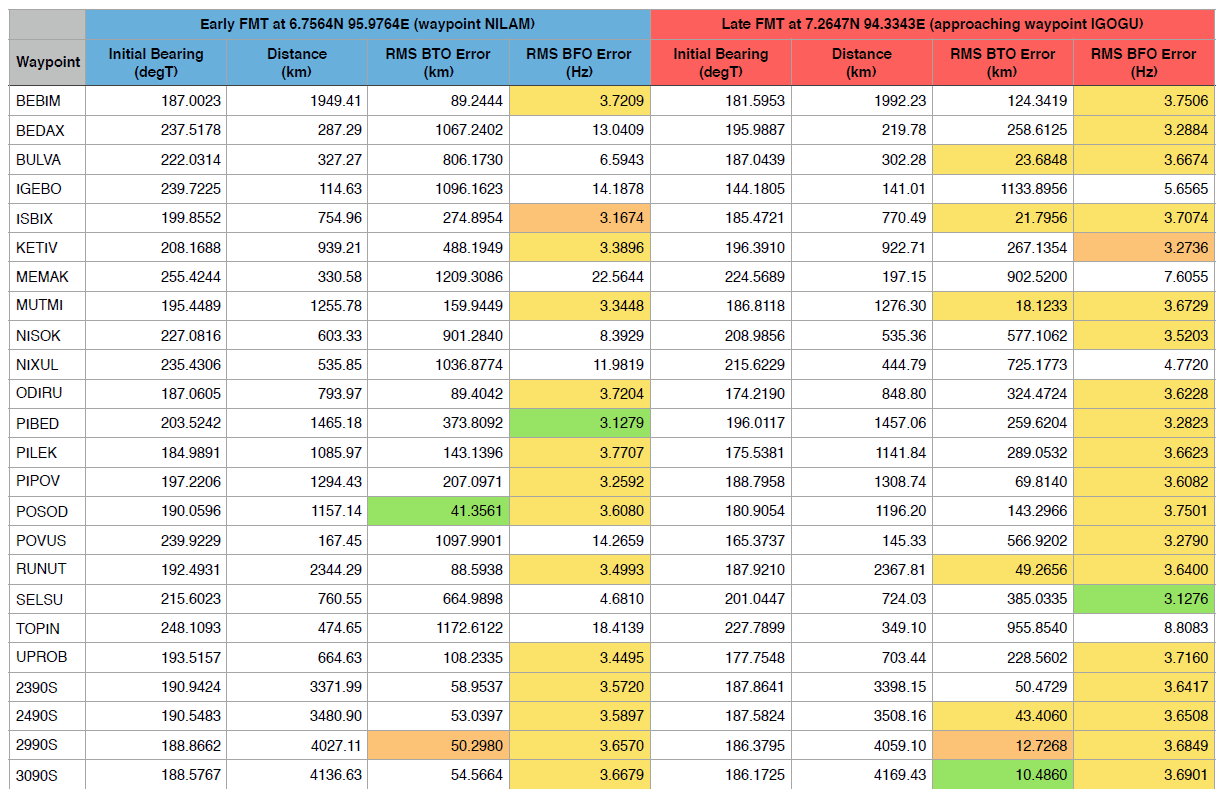
Table 1: Derived RMS BTO and BFO errors for assumed paths to the waypoints as indicated in the far-left column for Early and Late FMTs at the locations shown.
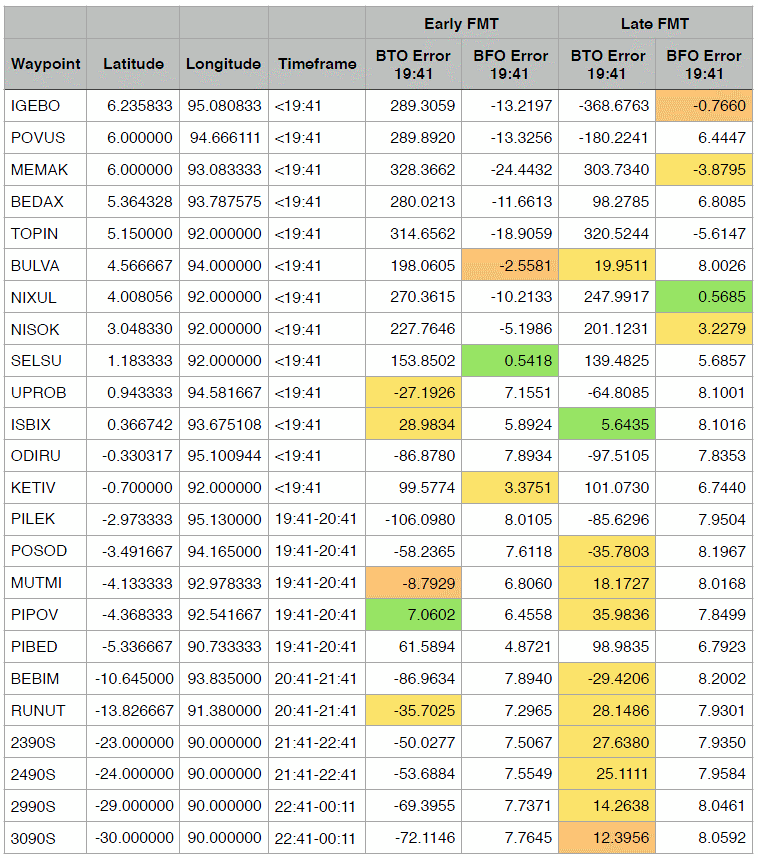
Table 2: BTO and BFO errors at 19:41 UTC for paths to waypoints as shown from both Early and Late FMTs as defined in Table 1.
Discussion
- The BTO error is clearly a better differentiator of the results than the BFO error.
- The result with the smallest BTO error is not the same as the result with the smallest BFO error (the plot of BTO error against BFO error gives a smooth curve for both early and late FMTs).
- It is easier to find results with a small BTO error with a Late FMT.
- The result with the smallest RMS BTO error was the waypoint 3090S with a Late FMT (as Don Thompson has previously suggested).
- The result that gave the smallest BTO error at 19:41 UTC was the waypoint ISBIX with a Late FMT.
- The smallest BFO error at 19:41 UTC was the waypoint SELSU for an Early FMT (course 215.6°T) and the waypoint NIXUL for a Late FMT (also course 215.6°T).
- Because these smallest BFO errors at 19:41 UTC result from a course of around 215°T and this was also not far off the possible path at 18:39:55 to 18:40:56 UTC (as mentioned above), further investigations were undertaken, as below.
Further Investigations
Using pairs of waypoints, the best result obtained was for ISBIX and 3090S; but this still did not solve the BFO problems at the time of the first phone call (near 18:40) or at 19:41 UTC.
However, using triplets of waypoints, the trio NISOK, ISBIX and 3090S led to a solution to both problems:
- The path obtained at 18:39:55 to 18:40:56 UTC was 208.9°T, which gives a BFO error of -2.6 Hz and a constant course during the timeframe of the first call.
- The BFO error obtained at 19:41 UTC is just 0.5 Hz.
- The overall RMS BFO error is 1.7 Hz.
NISOK is a waypoint between waypoint SELSU and waypoint NIXUL, and on the same longitude (see Table 2).
The resultant flight path is shown below. It could be argued that such a path might be that followed by someone wanting to avoid Indonesia to the extent possible, whilst confusing any observer as to the ultimate intention*.
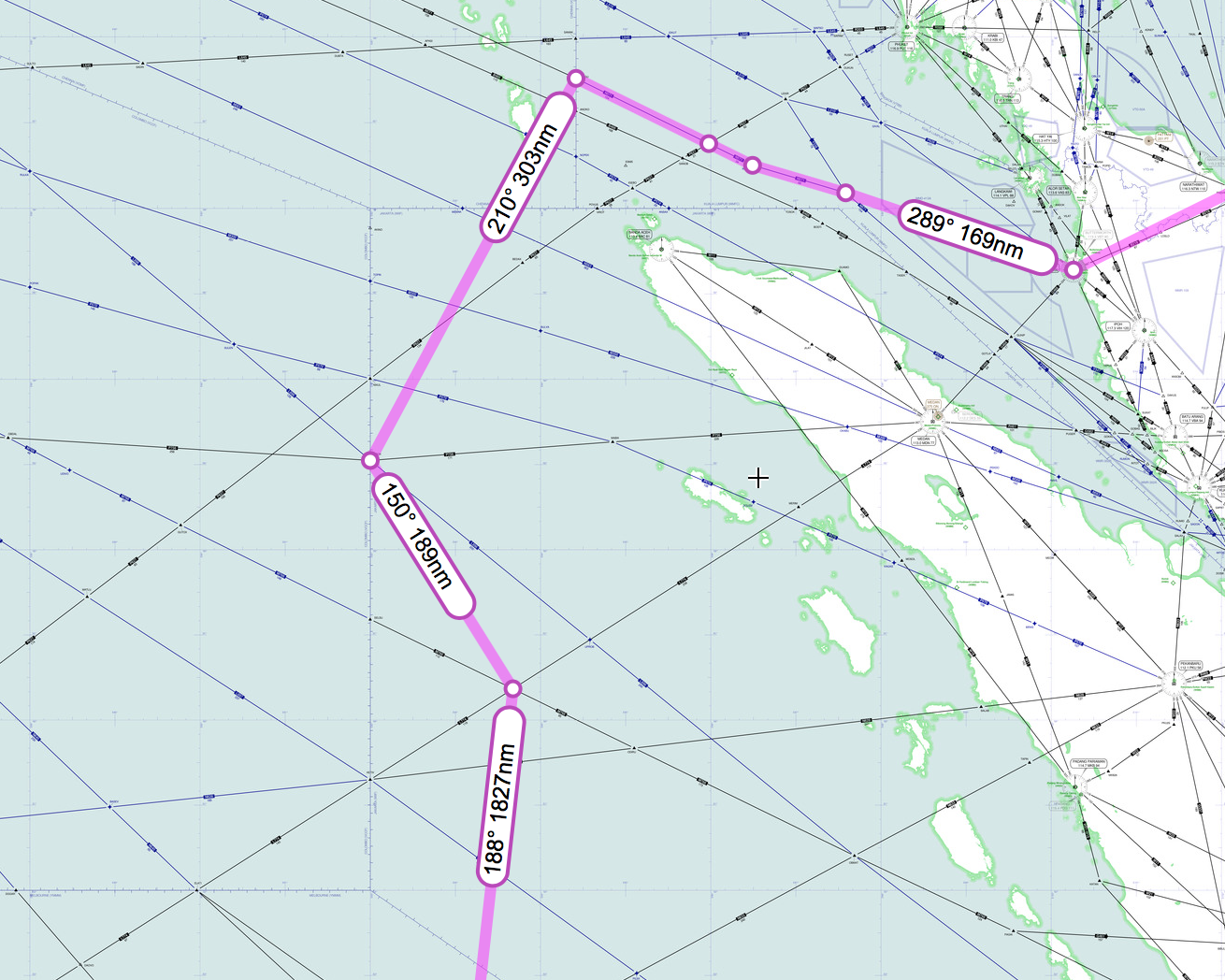
It is also noted that this path fits the location and directions of the suggested sightings by Kate Tee, although the timing is out by 30 minutes from her evaluation of the time in question (which is acknowledged to be a possibility).
*Note added by Duncan Steel: A contrary argument would be that the ultimate disappearance of MH370, and in particular its apparent non-detection by Indonesian radars, is conditional upon such a path having been taken. That is, such a path having been taken either accidentally or automatically (i.e. no pilot intent) results in the aircraft’s disappearance, and if such a path had not been taken then we would be more likely to know where it went. The path that Richard has suggested, based on detailed analysis, might be considered to have a low probability a priori; but a posteriori it might be that the disappearance of the aircraft is contingent upon that path (or one very much like it) having been followed, whether by chance or by intent.