An Investigation of a MH370 Hybrid Flight Path
Don Thompson and Richard Godfrey
2016 March 12th
(Updated March 15th)
Introduction
Flight path reconstructions for MH370 have typically involved an assumed route for the final (southwards) leg defined either by a single geodesic or a single loxodrome, each beginning at the Final Major Turn (FMT) near the northwest of the Malacca Strait and leading to an intersection with the 7th ping arc in the Southern Indian Ocean (SIO).
The BFO (Burst Frequency Offset) recorded at 00:11 UTC, however, deviates from the trend of the other BFOs recorded after 18:39 (as shown in Figure 1 below), and recognition of that fact has prompted the present study in which we explore a ‘hybrid’ autopilot flight navigation scenario within which a transition occurs in the path definition in the final hour of flight.
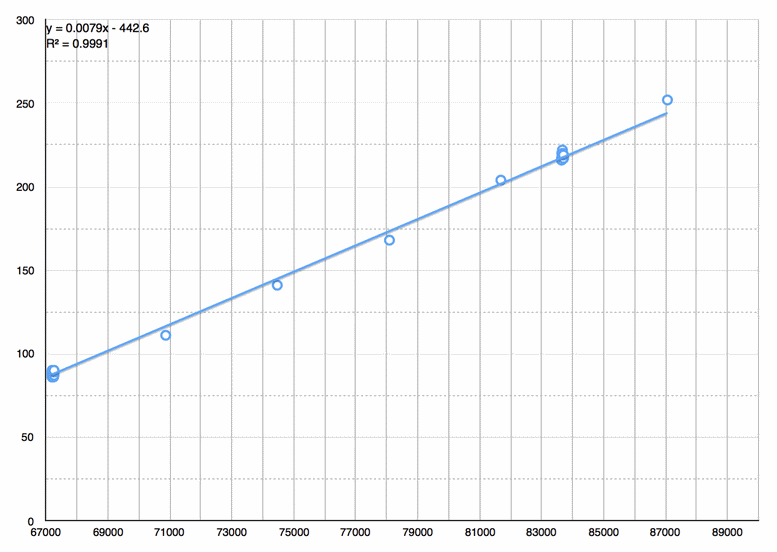
Figure 1: The values of the BFO plotted against the time (in seconds from the start of 2014 March 07 UTC). The final BFO value (at top right), which lies away from the trend line, has stimulated the present analysis, whereby a different type of path-following is taken to occur after an assumed final waypoint located at latitude 30 degrees south,
longitude 90 degrees east.
Hybrid flight path model
The route reconstruction studied in the present report is based on the following linked-pair of assumptions:
(a) The B777 Flight Management System (FMS) was providing navigational instructions to the Autopilot Flight Director System (AFDS) via Lateral Navigation (LNAV) so as to fly the aircraft to a pilot-defined latitude/longitude waypoint [1] in the SIO; and
(b) The Flight Management Syetem (FMS) maintained the subsequent path (i.e. that taken after the overflight of the waypoint), in accord with the default reversion mode stipulated for a Route Discontinuity (according to the B777 Flight Crew Operations Manual, or FCOM [2]).
Briefly, when the FMS completes navigation to the final defined waypoint on any route it then enters the ‘Route Discontinuity’ state, but continues to provide guidance to the AFDS via LNAV. In Route Discontinuity mode the FMS guidance reverts to a simple magnetic (compass) vector as defined by the final heading of the previous leg (i.e. that maintained until the final defined waypoint was reached). That is, for the flight leg between the penultimate waypoint (in this case, likely near the FMT) and the final or ultimate waypoint the path flown would be a great circle (or geodesic); however, after passing the final waypoint the path flown is a loxodrome or rhumb line: a path with a constant bearing, with that bearing in this case being measured relative to Magnetic (rather than True) North.
Exploration of this ‘hybrid’ path reconstruction is an extension of the ‘constrained autopilot defined’ philosophy adopted by the Independent Group (IG), which searches for paths conforming with both BTO (Burst Timing Offset) and BFO data, and complies with the deterministic aircraft navigation characteristics rather than a purely data-led mathematical fit.
Previous IG modelling has explored how closely a geodesic/great circle path or loxodrome/rhumb line path can be fit to the BTO and BFO data from an assumed FMT positional fix through to a point on the 7th arc. The route reconstruction in the present case exploits something observed in these previous models: they tend to pass close to the point 30S090E (latitude 30 degrees south, longitude 90 degrees east). The route reconstruction here in this hybrid treatment is based an an assumption that 30S090E is the fix or waypoint for a final FMS ‘track-to-fix’ (TF) leg and, subsequently, the FMS reverts to a default of following a magnetic vector (MV), the non-deterministic FMS MV leg type, as indicated in the flight manuals [2]. In an ordinary flight, such a MV loxodrome would continue until manual intervention by the pilots.
While flying the terminal MV leg the aircraft track over Earth’s surface is subject to the prevailing magnetic variation, and also high altitude winds. Combining:
(i) The Global Data Assimilation System (GDAS) atmospheric observations the start of 2014 March 08;
(ii) The table of magnetic declinations or variations (2005*) for different geographical coordinates, consistent with the model apparently loaded into the MH370 (aircraft 9M-MRO) FMS; and (iii) The aircraft speed and heading at 30S090E
… the surface track for the final (MV) leg can be determined.
*The magnetic declination tables used for navigation in the FMS of modern aircraft are mandated to be updated every decade in the year ending with the numeral ‘5’.
Analysis
The BFO for the 00:11 R-channel log-on interrogation event deviates from the trend across the earlier BFOs (sparse as the trend is), as shown in Figure 1 above. The analysis we applied tested how a hybrid geodesic-plus-magnetic-north-referenced path might instead fit the BFO data.
- The FMS, commanding LNAV via roll commands to the AFDS, will navigate the aircraft to any chosen location; an assumption we make is that that the intended destination was in the SIO;
- A FMS track-to-fix (TF) leg is the most common element of a route definition;
- FMS reversion at a Route Discontinuity is understood to occur [2];
- Assuming an LNAV route, the BFO trend suggests that a Route Discontinuity occurred after 23:00 (the mean C-channel BFO is below the trend);
- The final fix/waypoint within the FMS-computed fuel range ensures the route will be executed in LNAV and VNAV without errors.
The goal here was to identify a path for the final MV leg, starting from S30E090 due to the fact that that true-track and geodesic solutions in earlier flight models passed close to that ’round figure’ point.
Based on Richard’s MH370 Flight Model a hybrid flight path model was developed using a great circle path from a late FMT to a pilot-defined waypoint at 30S090E, followed by a constant magnetic heading loxodrome from 30S090E to an end point at that loxodrome’s intersection with the 7th arc.
A constant Mach speed (0.817) was used, because this was found to provide the best fit to the satellite data (BTO and BFO values).
The flight path after passing by 30S090E at 23:21:20 UTC was calculated in 10-minute steps, the route calculated in this way being shown in Figure 2 below. Details of the latitude and longitude of this path at different times (i.e. in 10-minute steps) are given in Table 1 below.
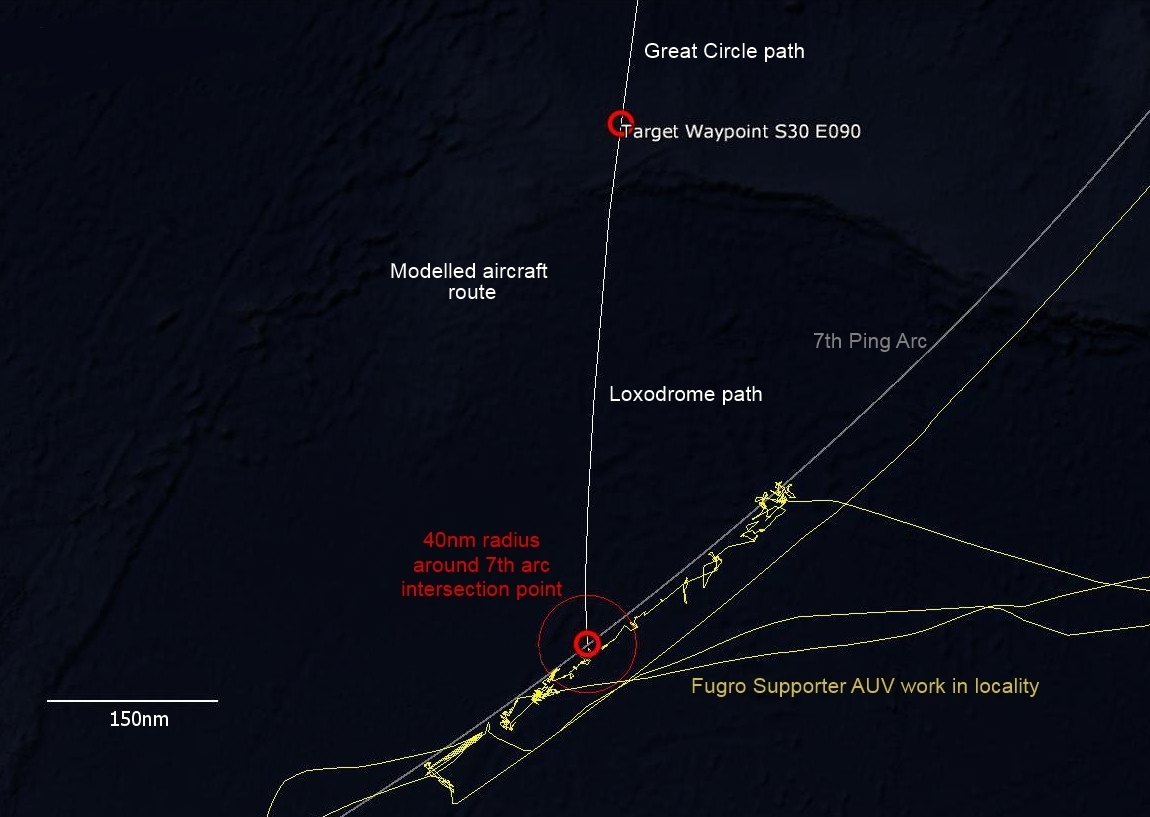
Figure 2: Prior to the assumed final/target waypoint and from the FMT the modelled path of MH370 follows a great circle (or geodesic); after that waypoint the path assumed is a loxodrome or rhumb line based on a magnetic reference (i.e. Magnetic North not True North). That path intersects the 7th ping arc at a point near 37.3S, 89.5E.
Results
Due to the magnetic declinations/variations and the high-altitude winds, the track changes its azimuthal direction from 187.0475°T at 30S090E (the assumed final waypoint, passed at 23:21 UTC) to 177.9864°T at the time of crossing the 6th ping arc (i.e. at 00:11 UTC). The various representations of the track or heading at different junctures are given in Table 1.
The resultant hybrid flight path reached the 6th arc at a location near 36.46S, 89.44E (see Table 1 below). This fits the BTO value obtained at 00:11 UTC to within 0.8 km.
The overall RMS BTO Error is 5.9 km, and the overall RMS BFO Error is 3.2 Hz.
Excluding the 19:41 arc (subject of a previous post on the use of further waypoints closer to the FMT), the RMS BTO rrror is 3.4 km, and the RMS BFO error is 1.0 Hz.
Extrapolating the loxodrome flight path for the final leg to the 7th arc (the subject of a previous post on the aircraft’s behaviour after flame-out), the end point obtained is near 37.34S, 89.48E (see Table 1 below) .
The relevant flight path details are given in Table 1 below.

Table 1: Hybrid-model flight details. The location given in the penultimate row (time close to 00:11 UTC) corresponds to the crossing of the 6th arc; the location in the bottom row (time 00:19:29 UTC) is the place at which this flight path crosses the 7th arc.
Conclusion
Richard’s flight path model v16, using an assumed great circle path from a late FMT, resulted in an end point (i.e. an intersection with the 7th ping arc) near 38.19S, 88.04E. The hybrid path model described in the present report leads to an end point near 37.34S, 89.48E. If the hypothesis proposed in this report is correct — that the final waypoint available to the FMS following the FMT was the ’round figure’ of 30S090E, and after passing that location a ‘Route Discontinuity’ condition resulted in the FMS flying the aircraft on a loxodrome with a magnetic reference, in apparent accord with the FCOM — then the latter location (37.34S, 89.48E) would be our best estimate of the place that MH370 reached the 7th arc, based solely on the satellite data.
Note that the assumption of a constant Mach speed is a feature of the model described in the present report. A refinement that might be made at some stage is that the speed between the 6th and 7th arcs might be expected to be reduced slightly due to the aircraft then operating on only one engine, this being the distinction between Richard’s flight models v16.0 and v16.1: see this post. The effect of allowing for this deceleration between the 6th and 7th arcs was found in that previous post to be a shift in the end point latitude by 0.2 degrees northwards and 0.3 degrees in longitude eastwards. Those figures compare with the shifts of 0.85 degrees northwards and 1.44 degrees eastwards found above. That is, a further shift northeast on the 7th arc would result if the falling speed at the end of the flight were included in the model applied here, but that shift would be of a lesser magnitude than the effect identified herein caused by assuming that the latter part of the flight were following a magnetic loxodrome from 30S090E, rather than a continued great circle path.
[1] Boeing 777 Flight Management System Pilot’s Guide, Honeywell, October 2001; Section 10: Advanced Flight Planning.
[2] Continental Airlines B777–226 Flight Manual, and Qatar Airways B777 Flight Crew Operations Manual, Boeing Company: “LNAV maintains current heading when […] passing the last waypoint prior to a route discontinuity.”